I am a PhD candidate in Robotics at the Georgia Institute of Technology, where I'm fortunate to be advised by Ye Zhao and
Danfei Xu.
I was supported by the IRIM PhD Fellowship.
My research focuses on physically grounded learning for humanoid loco-manipulation,
combining model-based trajectory optimization with learning-based methods.
I am currently a research scientist intern at Meta.
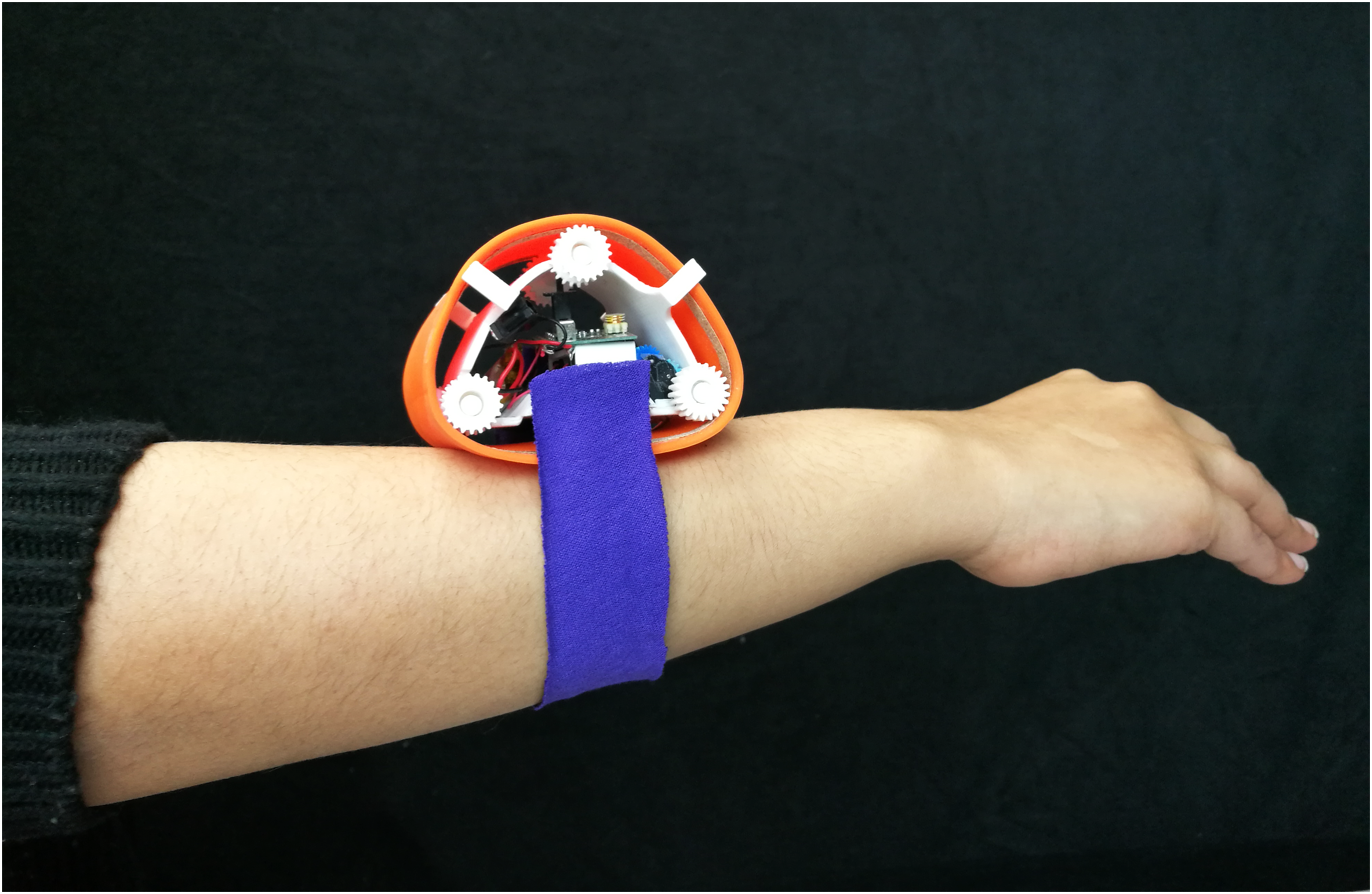
[2025/06] Our SkinGrip paper accepted to IROS 2025.
[2025/04] I passed my Ph.D. qualifying exam.
[2023/04] I've been awarded the IRIM Fellowship.
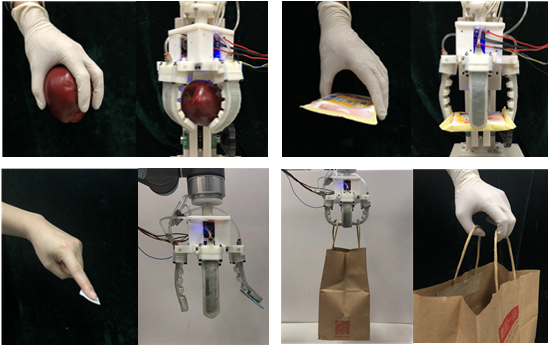
[2023/01] Our multimodal grasping paper accepted to IEEE Transactions on Robotics (T-RO).
Research
I work on physically grounded humanoid control and learning, with a focus on contact-rich loco-manipulation.
My research explores how to combine model-based trajectory optimization with learning-based methods to generate dynamically feasible,
force-aware behaviors for humanoid robots operating in real physical environments.
I'm particularly interested in enabling reliable and safe humanoid autonomy by grounding learning and planning in physically consistent constraints,
allowing structured physical knowledge to guide learning toward policies that transfer to real-world deployment.